行为
错误 #250
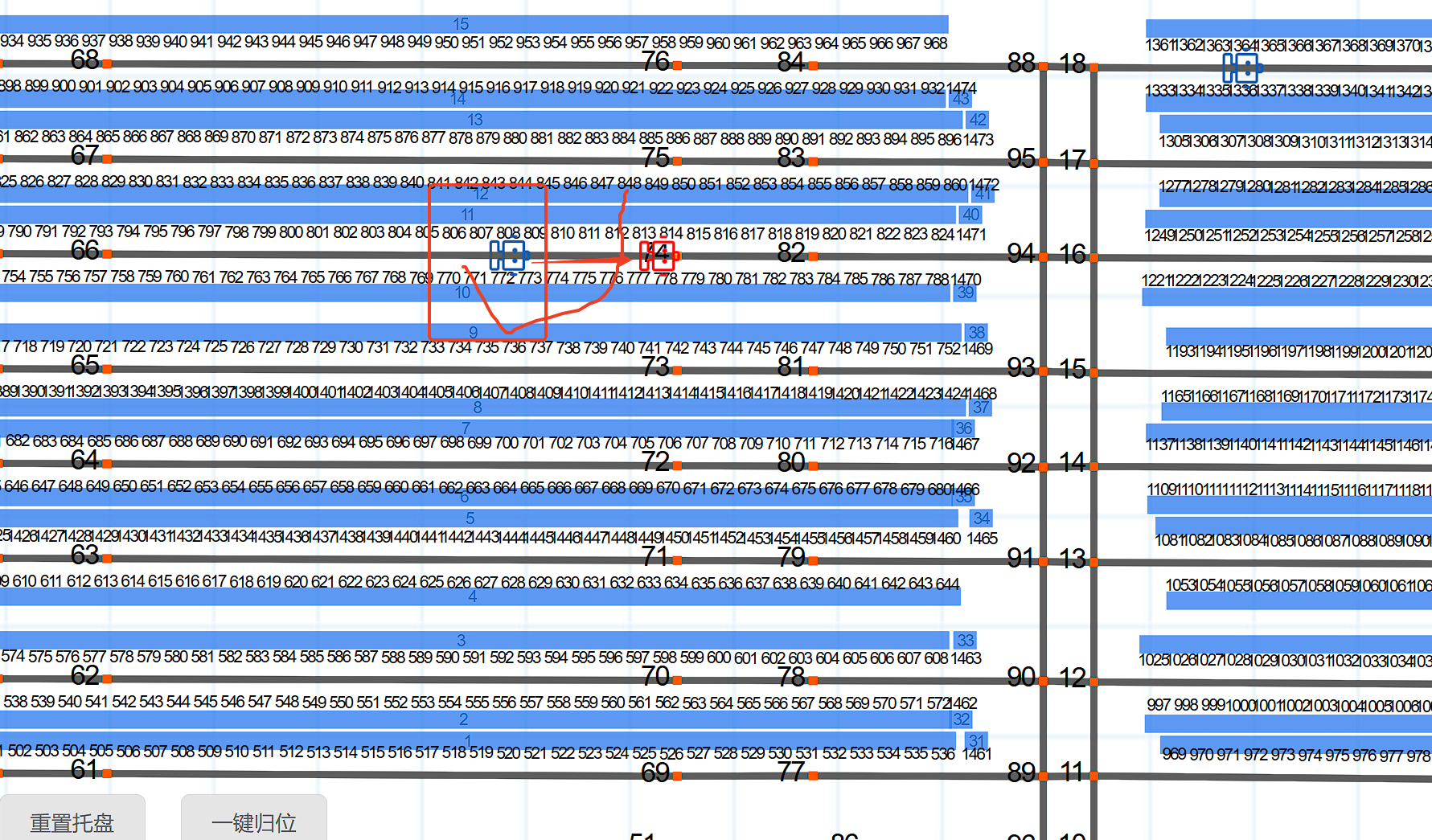
打开011020002任务派发给机器人 10,机器人10停车等待机器人 9 完成任务后再继续行驶到目的地作业,实际异常提前完成任务了
开始日期:
2024-11-29
计划完成日期:
% 完成:
0%
预期时间:
解决方案:
描述
实际是9号机器人在执行中任务做了避让,然后10号机器人向前移动过程中直接完成任务(实际10号机器人规划的路径还没走完,直接完成任务)
文件
{kind=link}
没有任何数据可供显示
行为
0%
描述
实际是9号机器人在执行中任务做了避让,然后10号机器人向前移动过程中直接完成任务(实际10号机器人规划的路径还没走完,直接完成任务)
文件
没有任何数据可供显示