行为
需求 #1506
已关闭pgs14提升转弯速度;降低运行时插齿高度
状态:
已关闭
优先级:
高
指派给:
-
需求分析:
描述
客户需求:AGV旋转速度低;运行插齿高度低需支持更改
文件
由 李 子君 更新于 8 个月 之前
- 文件 1530ca0cbe3147a28f37962ce592bbfd.png 1530ca0cbe3147a28f37962ce592bbfd.png 已添加
- 状态 从 新建 变更为 分析中
运行状态叉齿高度更改方式:
1.使用finalshell工具连上车
2.进入如下目录:/opt/robot_data/vehicle_config/
3.找到对应文件:task_sequence.yaml
4.双击打开文件,找到如截图中所示的部分
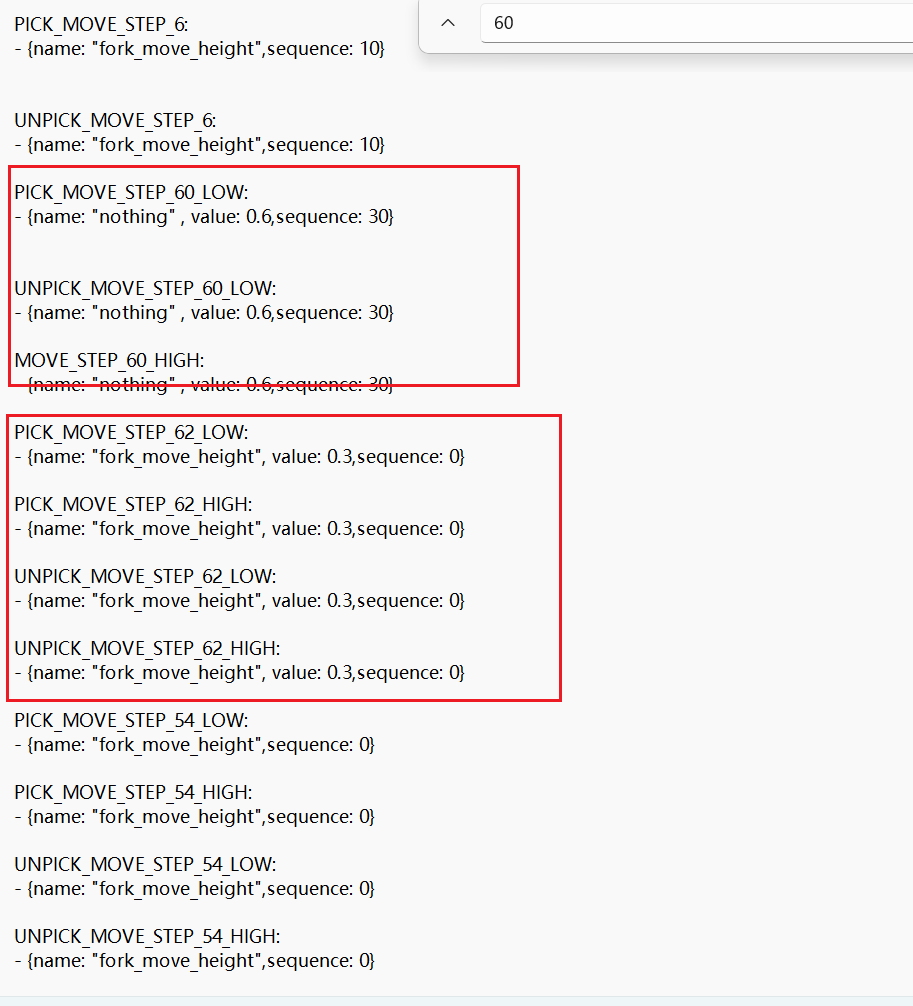
5.注意看,60和62,两部分所对应的内容,不一定和截图一致,截图只是举例,但是两个位置应该只有一个的name后面是有内容的
6.name后nothing的,是没有使用的不管,看name后面是fork_move_height的,看他后面value对应的值,单位是m,修改这个值到期望状态,重启后验证是否生效
转弯速度,需要另外找项目经理提需求,孟宗宝孟工统一协调研发时间做处理
行为