行为
错误 #1359
已关闭{kind=link}
{kind=link}
{kind=link}
由 李 子君 更新于 9 个月 之前
- 文件 474a20786b154975ba91972752ecae25.png 474a20786b154975ba91972752ecae25.png 已添加
- 文件 f250de7c4cbc4d4eb7accf344783849c.png f250de7c4cbc4d4eb7accf344783849c.png 已添加
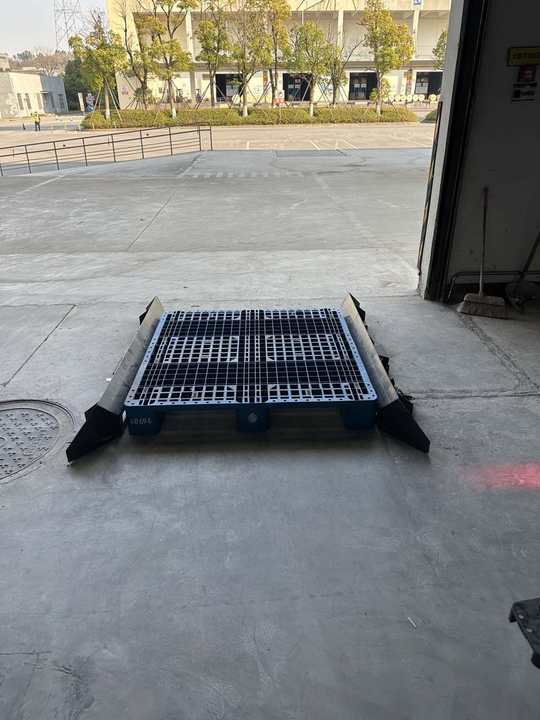
补充现场限位安装后,托盘的照片
行为
补充现场限位安装后,托盘的照片