行为
错误 #1312
已关闭1号车启动后,下任务不动
开始日期:
2025-03-10
计划完成日期:
% 完成:
100%
预期时间:
根因:
解决方案:
一、检查触边
①用脚踢触边,观察有无继电器吸合的声音
二、看触边有没有破损,有的话基本可以确定是触边坏了
三、触边没破损,要查安全板,可能是安全板坏了,这个需要研发指导下,需要用到万用表量通断,把安全板上面的两根触边线拔下来分别接入万用表的两个表笔,万用表打通断挡位,然后踢触边看万用表有没有响
结果:继电器上触边两根线的触头松动。
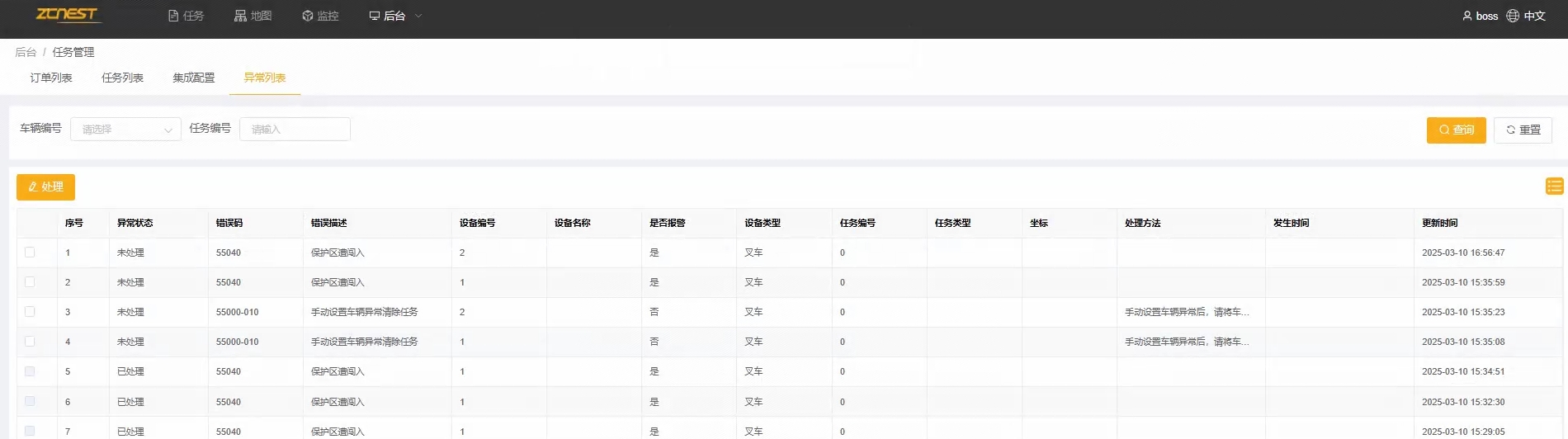
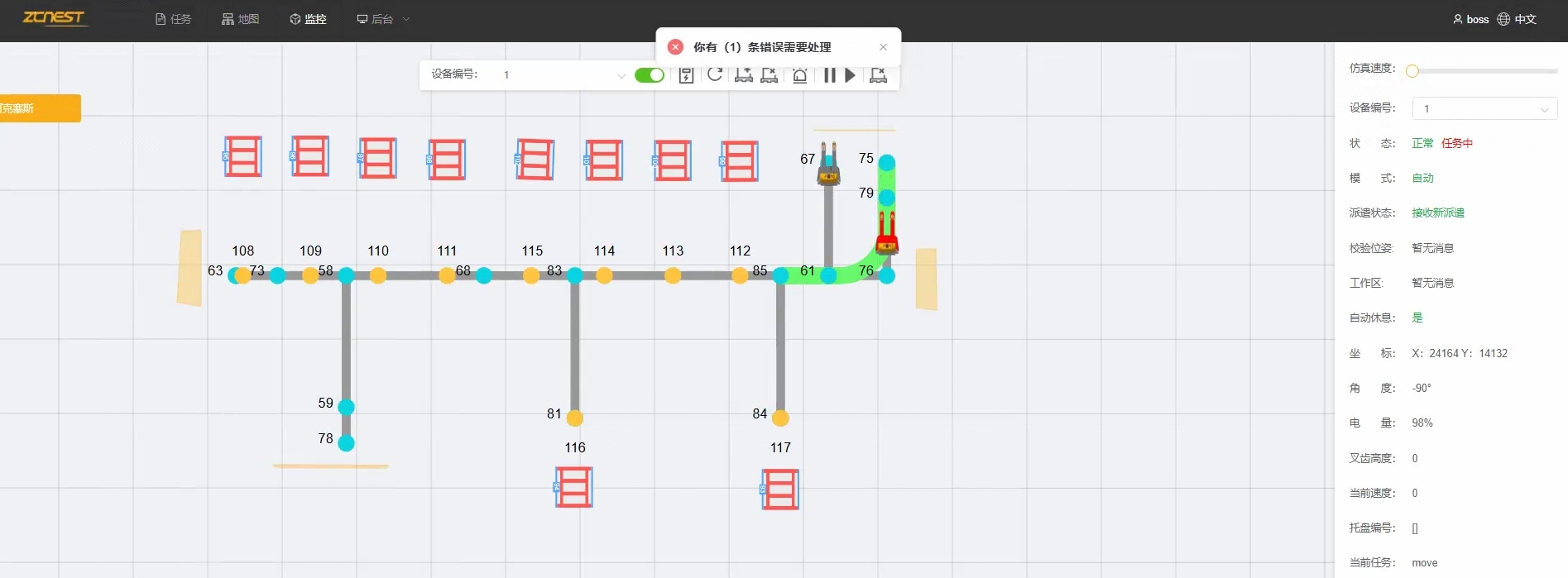
描述
时间:下午现在
地点(rcs监控截个图+实车状态拍全景),
人物(车号),事情发生过程(重启,等有坐标跳动了,手动下道路节点任务),
结果(1号车有音乐,无报错)
文件
{kind=link}
{kind=link}
行为